vqvae出自[1711.00937] Neural Discrete Representation Learning,用于无监督学习离散表征,目前在多模态生成领域还有使用. 这里学习一下代码
VQVAE
vqvae道理本身很简单,它的提出与pixelcnn、自回归模型息息相关,像vae,gan这种生成式模型,它们更像是对整个数据进行估计,而自回归模型又与序列模型相关,更像是对数据生成分布的建模
自回归模型以序列中的先前值为条件进行预测,而不是基于潜在随机变量。因此,他们试图对数据生成分布进行显式建模,而不是对其进行近似
poixelcnn就是一个自回归模型,而其每次就是从vqvae得到的离散结果中进行采样序列性地生成结果,为了实现这种效果利用了一种masked convolution,将卷积权重后面部分置0,使得在卷积的时候不关注后面的结果ToyPixelCNN.ipynb at master · pilipolio/learn-pytorch
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21class MaskedConv(nn.Conv2d):
def __init__(self, mask_type, *args, **kwargs):
super(MaskedConv, self).__init__(*args, **kwargs)
self.mask_type = mask_type
self.register_buffer('mask', self.weight.data.clone())
channels, depth, height, width = self.weight.size()
self.mask.fill_(1)
if mask_type =='A':
self.mask[:,:,height//2,width//2:] = 0
self.mask[:,:,height//2+1:,:] = 0
else:
self.mask[:,:,height//2,width//2+1:] = 0
self.mask[:,:,height//2+1:,:] = 0
def forward(self, x):
self.weight.data *= self.mask
return super(MaskedConv, self).forward(x)
现在许多的模型,包括transformer都是auto-regressive的,而GAN与VAE并不是,它们的缺点就是难以建模离散数据.而vqvae就弥补了这一点.
而VQVAE中重点其实是设计好一个离散字典后,使用了一种技巧将梯度传导使得能够更新这个字典.
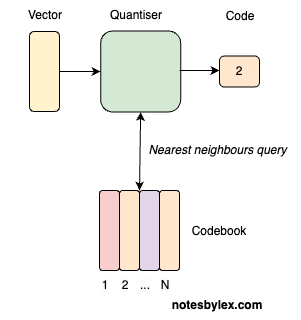
这种设计称作直通估计器,将decoder得到的梯度直接传到了encoder.假设codebook的shape是[codebook_size,codebook_dim],输入特征shape是[size,codebook_dim],通过一个指标得到它们的距离(可以使用torch.cdist)得到[size,codebook_size],这相当于得到了特征上每个位置在字典上对应的位置.
1
2
3
4
5
6
7
8
9
10# 写法1
dist_manual = torch.sqrt(
torch.sum(x ** 2, dim=1, keepdim=True) +
torch.sum(y ** 2, dim=1, keepdim=True).t() -
2 * x @ y.t()
)
# 写法2 better readable and efficient since no gradient computation
with torch.no_grad():
dist = torch.cdist(x, implicit_codebook)
indices = dist.argmin(dim = -1)
根据最近的距离得到嵌入后的特征1
2
3
4
5
6
7
8# 写法1
min_encoding_indices = torch.argmin(d, dim=1).unsqueeze(1) # (encoded_feat size,1)
min_encodings = torch.zeros(
min_encoding_indices.shape[0], self.n_e, device=z.device) # (encoded_feat size,embedding_size)
min_encodings.scatter_(1, min_encoding_indices, 1) # one-hot like
# 写法2 dry and more clean
min_encoding_indices = torch.argmin(d, dim=1)
my_min_encodings = F.one_hot(min_encoding_indices.squeeze())
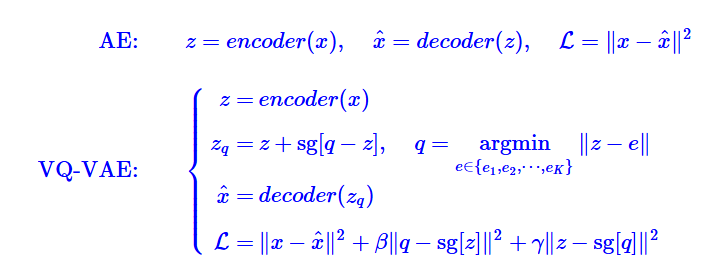
one-hot的shape是[encode_size,embed_size],下面公式中第三项是commitment loss,用于更新encoder输出,第三项用于更新字典
为了学习嵌入空间,使用最简单的字典学习算法之一,向量量化( VQ )。VQ目标使用l2误差将嵌入向量ei移动到编码器输出ze ( x )
1 | z_q = torch.matmul(min_encodings, self.embedding.weight).view(z.shape) |

此外可以使用EMA更新字典
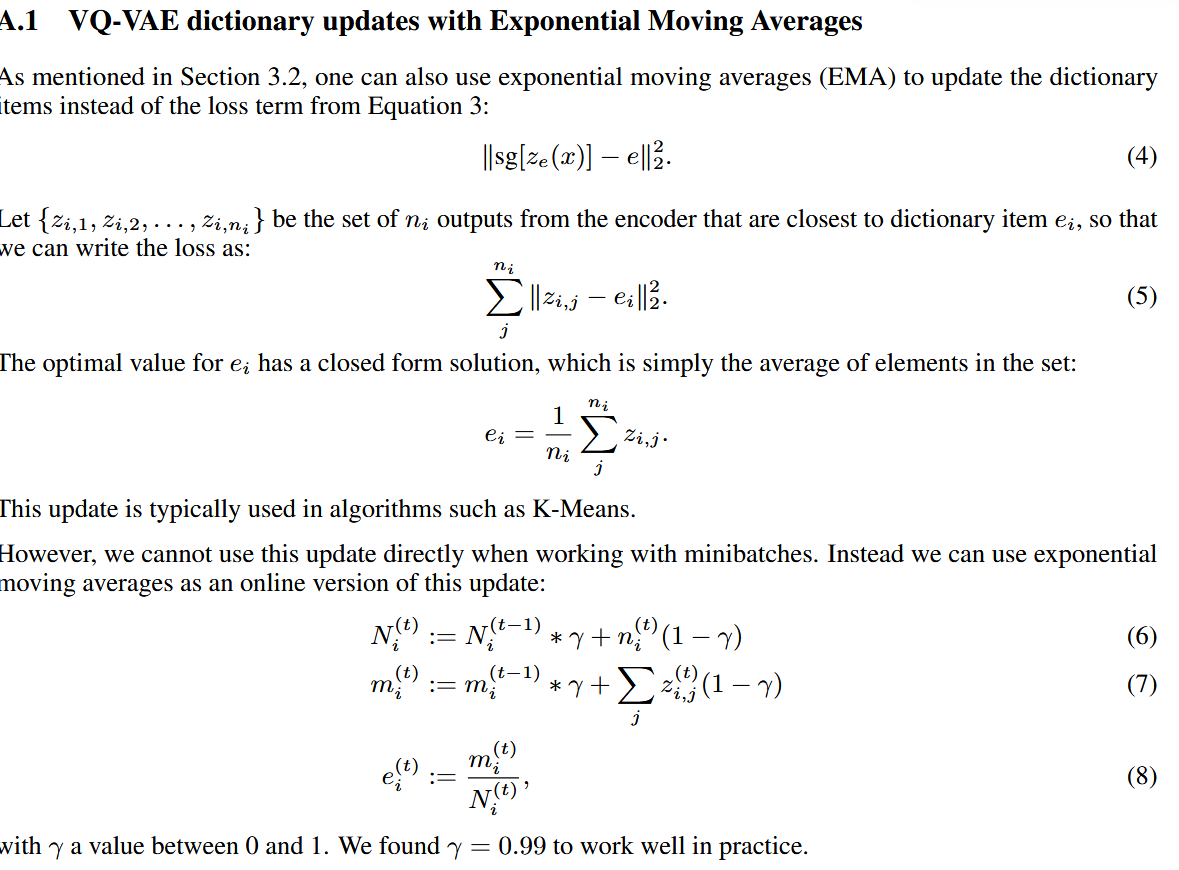
这里的更新逻辑是,每次更新ema_cluster_size,针对每个嵌入的向量,得到与它最近的特征向量个数,通过ema更新,而权重就是每次嵌入的值通过ema更新1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23# Update weights with EMA
if self.training:
self._ema_cluster_size = self._ema_cluster_size * self._decay + (
1 - self._decay
) * torch.sum(encodings, 0)
# Laplace smoothing
n = torch.sum(self._ema_cluster_size.data)
self._ema_cluster_size = (
(self._ema_cluster_size + self._epsilon)
/ (n + self._n_embeddings * self._epsilon)
* n
)
dw = torch.matmul(encodings.t(), flat_z_e)
self._ema_w = nn.Parameter(
self._ema_w * self._decay + (1 - self._decay) * dw
)
self._embedding.weight = nn.Parameter(
self._ema_w / self._ema_cluster_size.unsqueeze(1)
)
VQVAE-2
简单来说就是多尺度的vqvae,设计了多个encoder-codelayer-decoder.
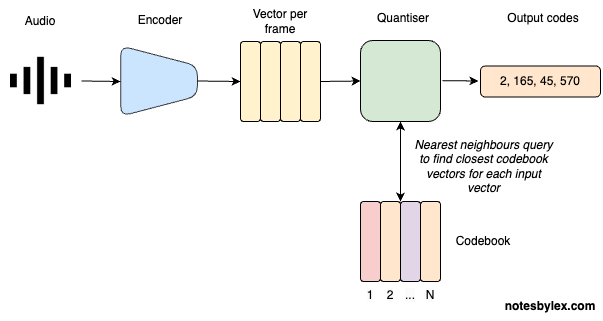
首先特征通过多个encoder降维,得到不同尺度的特征,再将不同尺度特征进行quantize,quantize后得到的特征进行上采样再decoder最终得到多尺度特征.
此外也有VQGAN论文在多尺度的基础上提出将codebook的维度从256到32,重建效果保持一致,同时将解码后的特征与codebook做l2-norm,使用cos相似度判断
Residual VQ
道理非常简单——quantize(x-quantize(x-quantize(x-…)))
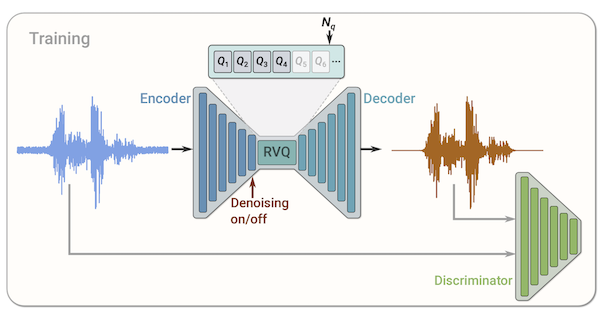
SIMVQ
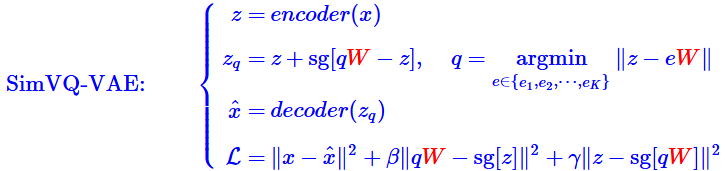
据论文作者所说,在codebook上进行维度转换,提高编码表的利用率,使得在许多优化器上表现更好. 在具体代码上,我参考了lucidrains/vector-quantize-pytorch: Vector (and Scalar) Quantization, in Pytorch的实现,其使用一个linear层变换codebook的维度,在进行计算距离时也使用这个转换后的codebook,量化也使用这个codebook,这样一来特征经过encoder后的维度需要与转换后的codebook的维度一致.1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67 return inverse(rotated)
class SimVQ(nn.Module):
def __init__(
self,
dim,
codebook_size,
codebook_transform: Module | None = None,
init_fn: Callable = identity,
channel_first=False,
rotation_trick=True,
input_to_quantize_commit_loss_weight=.25,
commitment_weight=1.,
frozen_codebook_dim=None,
):
super().__init__()
self.codebook_size = codebook_size
self.channel_first = channel_first
frozen_codebook_dim = default(frozen_codebook_dim, dim)
codebook = torch.randn(codebook_size, frozen_codebook_dim) * (frozen_codebook_dim ** -.5)
codebook = init_fn(codebook)
if not exists(codebook_transform):
codebook_transform = nn.Linear(frozen_codebook_dim, dim, bias=False)
self.code_transform = codebook_transform
self.register_buffer("frozen_codebook", codebook)
self.rotation_trick = rotation_trick
self.input_to_quantize_commit_loss_weight = input_to_quantize_commit_loss_weight
self.commitment_weight = commitment_weight
def codebook(self):
return self.code_transform(self.frozen_codebook)
def indices_to_codes(self, indices):
frozen_codes = self.frozen_codebook(indices)
quantized = self.code_transform(frozen_codes)
if self.channel_first:
quantized = rearrange(quantized, 'b ... d -> b d ...')
return quantized
def forward(self, x):
if self.channel_first:
x = rearrange(x, 'b ... d -> b d ...')
x, inverse_pack = pack_one(x, 'b * d')
implicit_codebook = self.codebook
with torch.no_grad():
dist = torch.cdist(x, implicit_codebook)
indices = dist.argmin(dim=-1)
quantized = implicit_codebook[indices]
commit_loss = F.mse_loss(x.detach(), quantized)
if self.rotation_trick:
quantized = rotate_to(x, quantized)
else:
commit_loss = (commit_loss + F.mse_loss(x, quantized.detach()) * self.input_to_quantize_commit_loss_weight)
quantized = (quantized - x).detach() + x
quantized = inverse_pack(quantized)
indices = inverse_pack(indices, 'b *')
if self.channel_first:
quantized = rearrange(quantized, 'b ... d-> b d...')
return quantized, indices, commit_loss * self.commitment_weight
可以看到上面代码中经常用到einops和einx以及torch的einsum操作,这些都是非常方便的库或者函数.这里介绍一下
einops中常用操作
rearrange
最常用的就是rearrange了,可以用来转换axis的顺序,composition,decomposition等1
2
3
4
5
6
7
8
9x = torch.randn(10,20,10,10)
# order
y = rearrange(x,'b c h w -> b h w c')
print(y.shape)
# composition
y = rearrange(x,'b c h w -> b c (h w)')
# decomposition
y = rearrange(y,'b c (h w) -> b h w c')
y = rearrange(y,'(b1 b2) h w c -> b1 b2 h w c',b1=2)
reduce
1 | # yet another example. Can you compute result shape? |
可以用于求均值,maxpooling等,1
2
3
4
5
6
7
8
9
10ims = torch.randn((10,20,30,30))*10-2
b,c,h,w = ims.shape
m_ims = reduce(ims,'b c h w -> b c',"min")
print(m_ims.shape)
m_ims = reduce(ims,'b c h w -> b (h w) c','min').transpose(1,2).reshape(b,c,h,w)
print(m_ims.shape)
print(ims == m_ims)
min2_ims = reduce(ims,'b c (h h2) (w w2) -> b c h w','mean',h2=2,w2=2)
reduce(ims,'b (h h2) (w w2) c -> h (b w) c',"max",h2=2,w2=2)
通过使用()保持dim,或者也可以使用11
2
3
4
5
6
7data = torch.randn(10,20,30,40)
mean_ = reduce(data,'b c h w -> b c () ()','mean') # 求均值
ans = data.mean(dim=[2,3],keepdim=True)
print((((ans-mean_)<1e-6).float()).mean())
max_pool = reduce(data,'b c (2 h) (2 w) -> b c h w','max') #max pooling
adaptive_max_pool = reduce(data,'b c h w -> b c ()','max')
stack and concatenation
1 | # rearrange can also take care of lists of arrays with the same shape |
将一个列表的tensor中的列表大小维度进行转换1
2
3
4
5
6c = list()
c.append(torch.randn(10,20,30))
c.append(torch.randn(10,20,30))
rearrange(c,'l c h w -> c l h w').shape
或者求一个列表中的所有tensor和、max等1
2
3
4
5
6
7
8c = list()
c.append(torch.randn(10,20,30))
c.append(torch.randn(10,20,30))
rearrange(c,'l c h w -> c l h w').shape
reduce(c,'c l h w -> l h w','mean').shape
reduce(c,'c l h w -> l h w','sum').shape
reduce(c,'c l h w -> l h w','max').shape
add or remove axis
1 | x = rearrange(x,'b h w c -> b 1 h w 1 c') |
channel shuffle
1 | c = torch.randn(10,30,10,10) |
repeat
1 | repeat(x,'b h w c -> b (h 2) (w 2) c') |
split dimension
1 | c = torch.randn(10,30,10,10) |
split有不同方法1
2
3y1, y2 = rearrange(x, 'b (split c) h w -> split b c h w', split=2)
result = y2 * sigmoid(y2) # or tanh
y1, y2 = rearrange(x, 'b (c split) h w -> split b c h w', split=2)
y1 = x[:, :x.shape[1] // 2, :, :]y1 = x[:, 0::2, :, :]
striding anything
1 | # each image is split into subgrids, each subgrid now is a separate "image" |
可以看到最常用的函数就是rearrange,reduce以及repeat,基本替代了原本的sum,transpose,expand,reshape等torch操作
parse_shape
通过parse_shape,相当于更方便地获得了需要的维度大小1
2y = np.zeros([700])
rearrange(y, '(b c h w) -> b c h w', **parse_shape(x, 'b _ h w')).shape
pack and unpack
pack是将一些列数据中的的一些维度放在一起1
2
3
4
5
6h,w = 100,200
import numpy as np
img_rgb = np.random.random([h,w,3])
img_depth = np.random.random([h,w])
img_rgbd,ps = pack([img_rgb,img_depth],'h w *')
print(img_rgbd.shape,ps)1
2unpacked_rgb,unpacked_depth = unpack(img_rgbd,ps,"h w *")
print(unpacked_rgb.shape,unpacked_depth.shape)
结合torch使用layers
1 | from einops.layers.torch import Rearrange,Reduce |
Einx
一种类似torch.einsum的计算方式,einsumeinsum tutorial是一种方便计算多个tensor乘积的方式,而Einx方便了写MLP-based架构代码,通过weight_shape和bias_shape结合pattern构造mlp1
2
3
4from einops.layers.torch import EinMix as Mix
mlp = Mix('t b c-> t b c_out',weight_shape='c c_out',c=10,c_out=20)
x = torch.randn(10,30,10)
y = mlp(x)
值得一提的是,einops也有einsum1
2
3
4from einops import einsum, pack, unpack
# einsum is like ... einsum, generic and flexible dot-product
# but 1) axes can be multi-lettered 2) pattern goes last 3) works with multiple frameworks
C = einsum(A, B, 'b t1 head c, b t2 head c -> b head t1 t2')
相关资料
- MishaLaskin/vqvae: A pytorch implementation of the vector quantized variational autoencoder (https://arxiv.org/abs/1711.00937)
- VQ-VAE/vq_vae/auto_encoder.py at master · nadavbh12/VQ-VAE
- VQ-VAE/vqvae.py at main · AndrewBoessen/VQ-VAE
- vqvae-2/vqvae.py at main · vvvm23/vqvae-2
- Autoregressive Models in Deep Learning — A Brief Survey | George Ho
- lucidrains/vector-quantize-pytorch: Vector (and Scalar) Quantization, in Pytorch
- VQ-VAE的简明介绍:量子化自编码器 - 科学空间|Scientific Spaces
- VQ的旋转技巧:梯度直通估计的一般推广 - 科学空间|Scientific Spaces
- VQ的又一技巧:给编码表加一个线性变换 - 科学空间|Scientific Spaces
- Writing better code with pytorch+einops
- Residual Vector Quantisation - Notes by Lex
- rese1f/Awesome-VQVAE: A collection of resources and papers on Vector Quantized Variational Autoencoder (VQ-VAE) and its application
